«Авиация и космонавтика (журнал №5 за 1968 г.)
Полеты закончились. Последний самолет с бортовым номером «11» зарулил на стоянку.
— Разрешите получить замечания? — обратился к летчику замещавший начальника группы обслуживания старший сержант Поликарпов.
Летчик устало провел ладонью по лицу, как бы собираясь с мыслями. По-видимому, он хотел в деталях воссоздать картину полета.
— Техника работала в общем нормально, — наконец сказал он. — Но вот автопилот… Опять он как-то вяло реагирует по тангажу…
Поликарпов слышал это уже не первый раз. Но тогда самолет уходил на регламентные работы. В ТЭЧ самым тщательнейшим образом проверили каналы угловой стабилизации — все параметры укладывались в допуска. И вот снова…
— Понятно, товарищ капитан, — твердо сказал Поликарпов. — Придется кое-что перенастроить…
Он принял решение с помощью регулировки повысить передаточный коэффициент автопилота. Тот самый коэффициент, который «заведовал» порцией управляющего сигнала ωz — угловой скоростью вращения самолета вокруг поперечной оси. «Если увеличить этот коэффициент, — рассуждал Поликарпов, — то это будет компенсировать запаздывание в канале тангажа. Значит, самолет начнет более энергично выбирать рассогласование и быстродействие автопилота повысится».
…Через день истребитель снова ушел в небо.
Прошло совсем немного времени. Впереди первый поворотный пункт маршрута. Но вот в динамике звучит тревожный доклад летчика:
— Резко кренит влево. Выполнение задания прекращаю.
Предпосылка родилась в общем-то из благородных намерений, которыми руководствовался технический состав, пытаясь удовлетворить пожелания летчика. Нет-нет и сейчас еще бывает, что летчик обращается к технику или инженеру с просьбой подрегулировать автопилот, «подкрутить» там кое-где коэффициенты. Основательны ли претензии летчика? И да и нет.
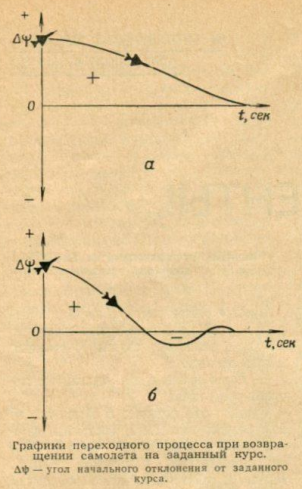
Каждый летчик обладает своей манерой пилотирования. Допустим, что летчик заметил по гиромагнитному компасу, что самолет отклонился от курса. Он немедленно через систему управления отклоняет аэродинамические рули. Самолет, повинуясь управляющим командам, возвращается на заданную линию пути. Но как возвращается? Одним летчикам нравятся плавные переходные процессы, при которых ошибка по курсу устраняется постепенно (монотонно), без перерегулирования, т. е. без изменения знака ошибки (рис., а). Другие предпочитают более энергичные эволюции, в результате которых время переходного процесса сокращается, но возможны небольшие выбросы, т. е. отклонения самолета от курса в противоположном направлении (рис., б). Поэтому вполне понятно желание летчика, чтобы и его помощник — автопилот — работал так же, как и он сам, т. е. в соответствии с индивидуальной манерой пилотирования.
Бортовые системы автоматического управления полетом в последние годы находят все большее применение практически на всех самолетах, эксплуатирующихся в наших частях. Роль автоматики возросла в связи с тем, что в ряде случаев выполнение боевой задачи и даже обычное пилотирование без автоматического управления стало весьма затруднительным.
Из большого количества автопилотов, демпферов рыскания, автоматов парирования колебаний самолета выделим автопилот АП-28. В процессе эксплуатации этого автопилота уже накоплен определенный опыт, который позволяет совершенствовать его техническое обслуживание, повышать безопасность в полете. Опыт эксплуатации АП-28 имеет большое значение также для освоения инженерно-техническим и летным составом новых комплексных систем автоматического управления полетом.
АП-28, как и всякий современный автопилот, является сложной кибернетической системой и имеет свой запас устойчивости. Это значит, что система «самолет — автопилот» устойчива только при вполне определенных значениях ее коэффициентов. При других же значениях устойчивость системы понижается, иными словами, самолет может выйти на закритические углы атаки, совершить опасные эволюции и т. д.
Когда техник в описанном случае «подкрутил» коэффициент автопилота по угловой скорости ωz, он совершенно упустил из виду, что установленное им значение передаточного числа является наилучшим (оптимальным) лишь для одного режима полета. На других же режимах переходный процесс обязательно будет или несколько затянутым или, наоборот, с перерегулированиями. Кроме того, техник не принял во внимание взаимосвязь пилотажных параметров (в данном случае — каналов крена и тангажа). Поэтому общая настройка автопилота стала оптимальной для какого-то крайнего режима полета, при достаточном удалении от которого система «самолет — автопилот» потеряла устойчивость.
Если автопилот не снабжен специальным корректирующим устройством, автоматически изменяющим его коэффициенты по режимам полета в зависимости, например, от -скоростного напора или числа М, то летчик всегда будет ощущать разницу в качестве управления самолетом. Па некоторых режимах ему будет нравиться работа автопилота, а на некоторых, естественно, нравиться не будет. Знать природу этой особенности автопилота надо как технику, так и летчику.
А вот другой пример разрегулировки автопилота. Речь идет о так называемом самоходе рулевой машины или, как его еще именуют, «подвижке». Сущность «подвижки» заключается в том, что при отсутствии на входе автопилота каких- либо управляющих сигналов руль все же отклоняется от балансировочного положения. В полете это приводит к потере высоты или уходу самолета с заданного курса. Поскольку причины «подвижки» кроются в несимметричности электромагнитной или механической системы управляющего реле, то попытки некоторых техников скомпенсировать самоход рулевой машины путем регулировки магнитного усилителя автопилота нельзя признать правильными.
Аналогично дело обстоит с ДУС — датчиком угловой скорости вращения самолета относительно осей стабилизации.
И эксплуатации было отмечено несколько случаев завышенного значения остаточного сигнала на выходе ДУС. Что следует понимать под термином «остаточный сигнал»?
Остаточным сигналом не совсем удачно названо выходное напряжение ДУС при отсутствии угловой скорости вращения самолета. Природа появления остаточного сигнала заключается в отклонении подвижной системы скоростного гироскопа и датчика сигнала от нейтрального положения, в котором она удерживается специальными центрирующими пружинами.
Пружины с течением времени и от воздействия неизбежных в полете вибраций, перегрузок и перепадов температур могут изменять свои упругие свойства. При этом центровка датчика будет нарушаться, а на его выходе появится напряжение. Превышение установленного допуска напряжения приводит к тому, что при вращении самолетов в одном направлении демпфирующий сигнал будет завышен, а в другом — наоборот, занижен. Возникший разбаланс вызывает в полете раскачку самолета.
И вот на основе замечаний, сделанных летчиком, техники иногда пытались скомпенсировать этот сигнал разбаланса регулировкой нуля» на выходе магнитного усилителя автопилота. Но эти регулировки не могут дать какого-либо положительного эффекта, поскольку несим- метрия скоростного сигнала остается, а подстройка «нуля» лишь вводит техника в заблуждение, ибо достигается балансировка канала у самолета, находящегося в положении статического равновесия.
Для повышения надежности автопилота в полете в настоящее время широко используются специальные средства обеспечения безопасности, так называемые устройства встроенного контроля.
Бортовые устройства контроля автопилота ЛИ-28 измеряют углы отклонения рулей, углы крена самолета, его реакцию па специальные испытательные (тестовые) сигналы, пропускаемые по электрическим цепям автопилота. При достижении параметрами предельных значений автопилот автоматически отключается. Сами контролируемые параметры выбира
ются из условия обеспечения безопасности на различных режимах полета.
Каковы особенности работы схемы безопасности полета, о которых не должен забывать летный состав, особенно при выполнении реального задания, скажем, на боевое применение на учениях?
В условиях, например, воздушного боя летчику придется использовать весь диапазон располагаемых перегрузок самолета, совершать при этом энергичные эволюции, отклоняя рули на большие углы. Если такое управление самолетом осуществлять через автопилот, то для предотвращения его ложных отключений схемой безопасности надо датчик предельных отклонений настроить на максимально возможное отклонение руля. Однако, с другой стороны, при внезапном повреждении автопилота контролирующее устройство схемы безопасности может тогда не дойти до установленного порога срабатывания и летчик окажется в сложной ситуации. Таким образом, при настройке средств безопасности в режиме автоматического управления ищется компромиссное решение вопроса. Особенно четко это обстоятельство должен понимать летчик, чтобы знать, когда для более эффективного выполнения задания целесообразно перейти па ручное управление.
В свою очередь инженерно-технический состав обязан уделять самое пристальное внимание состоянию средств обеспечения безопасности полета. Схема безопасности только в том случае будет полезна, если надежность ее работы на порядок выше надежности автопилота.
При выполнении регламентных и профилактических работ следует тщательно осматривать элементы схемы безопасности, а если необходимо, то и производить регулировку порогов срабатывания контрольных устройств. Всякая регулировка, разумеется, должна обязательно проводиться с использованием совершенной контрольно-измерительной аппаратуры. Никогда не следует забывать о том, что современный автопилот — это сложная многоканальная электронная система, у которой параметры взаимосвязаны и перестройка даже одного из них должна осуществляться в строгом соответствии с методикой комплексной проверки всего автопилота.
Инженер-подполковник Гамулин А. Кандидат технических наук
«Авиация и космонавтика (журнал №5 за 1968 г.)
Внимание! При использовании материалов сайта, активная гиперссылка на сайт Советика.ру обязательна! При использовании материалов сайта в печатных СМИ, на ТВ, Радио - упоминание сайта обязательно! Так же обязательно, при использовании материалов сайта указывать авторов материалов, художников, фотографов и т.д. Желательно, при использовании материалов сайта уведомлять авторов сайта!